matlab版蚁群算法路径规划程序,用G2D算法
”路径规划 G2D 蚁群算法路径 蚁群算法 蚁群算法路径规划“ 的搜索结果
matlab版蚁群算法路径规划程序,用G2D算法

β为启发函数重要程度因子,其值越大,表示启发函数在转移中的作用越大, 即蚂蚊会以较大的摡率转移到距离短的节点,蚁群就越容易选择局部较短路径,这时算法的收敛速度是加快了,但是随机性却不高,容易得到局部的相对...
function main()G=[0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 1 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 1 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 1 1 1 0 0 ...
基于蚁群算法的机器人路径规划MA TLAB源码使用网格离散化的方法对带有障碍物的环境建模,使用邻接矩阵存储该环境,使得问题转化为蚁群算法寻找最短路径。function [ROUTES,PL,Tau]=ACASPS(G,Tau,K,M,S,E,Alpha,Beta,...
蚁群算法代码(m函数形式)
标签: 蚁群算法
蚁群算法MATLAB程序代码,m函数形式呈现,自己亲手敲的,完全可用

蚁群算法最早是由Marco ...蚁群算法根据模拟蚂蚁寻找食物的最短路径行为来设计的仿生算法,因此一般而言,蚁群算法用来解决最短路径问题,并真的在旅行商问题(TSP,一个寻找最短路径的问题)上取得了比较好的成效。
function [ROUTES,PL,Tau]=ACASP(G,Tau,K,M,S,E,Alpha,Beta,Rho,Q)%% ---------------------------------------------------------------% ACASP.m% ACS for Path Planning%% -------------------------------------...
本文对基本蚁群算法代码进行了详细的注释,每一步都简单易懂。程序在matlab中可直接运行,适合刚开始学习本算法的同学入门。
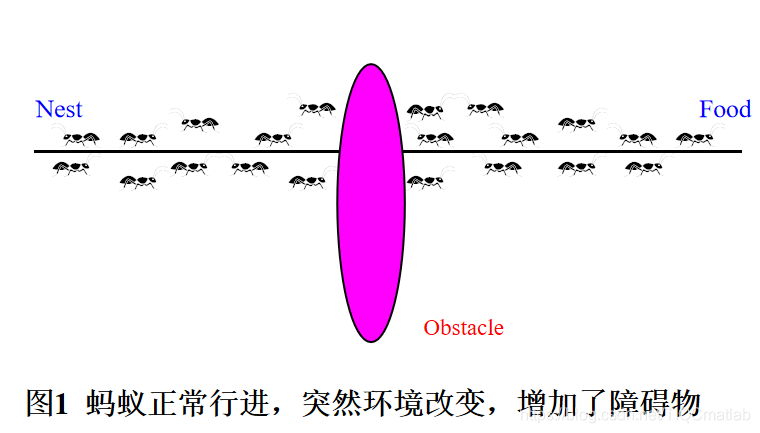

在这篇博文中,我们将介绍一种基于双向蚁群算法的路径规划方法,可以有效地解决这个问题。蚁群算法是一种模拟蚂蚁觅食行为的优化算法。蚂蚁在搜索食物时会释放信息素,其他蚂蚁会根据信息素的浓度来选择路径。这种...




蚁群算法最短路径通用Matlab程序下面的程序是蚁群算法在最短路中的应用,稍加扩展即可应用于机器人路径规划function [ROUTES,PL,Tau]=ACASP(G,Tau,K,M,S,E,Alpha,Beta,Rho,Q)%% -----------------------------------...

多种蚁群算法栅格地图最短路径规划 完整的代码,方可运行;可提供运行操作视频!适合小白!
利用蚁群算法基于matlab解决机器人路径规划(附源码)

蚁群算法最短路径通用Matlab程序(附图)function [ROUTES,PL,Tau]=ACASP(G,Tau,K,M,S,E,Alpha,Beta,Rho,Q)%% --------------------------------------------------------------- % ACASP.m% 蚁群算法动态寻路算法% ...
利用matlab实现蚁群算法路径规划算法的基本实践,包括路径搜索的二维栅格图。
function m_main() G=[0 1 0 0 0 1 0 0 0 1; 0 1 0 0 0 1 0 0 0 1; 0 1 0 0 0 1 0 0 0 1; 0 1 0 1 0 1 0 1 0 1; 0 1 0 1 0 1 0 1 0 1; 0 1 0 1 0 1 0 1 0 1; 0 1 0 1 0 1 0 1 0 1;...0 0 0 1 0 0...
推荐文章
- xr871-开始编译环境_xr871et芯片重置-程序员宅基地
- ROS2安装与入门——古月居视频学习笔记_学习ros2的视频哪个好-程序员宅基地
- 什么是Microsoft SharePoint 2010-程序员宅基地
- 深度探索:Understanding-K8s - 掌握Kubernetes精髓的开源教程-程序员宅基地
- filter导致跨域失效_Springboot 拦截器导致 @CrossOrigin 跨域失效的解决方案-程序员宅基地
- Winform学习笔记(二)—— WebClient异步回调Java后台接口_webclient回调-程序员宅基地
- 保姆级教程-手把手教你如何快速实现内网穿透,外网也能轻松访问自已的内网Web服务器_家里搭建服务器怎么实现内网穿透-程序员宅基地
- 深入解析Spring Boot中的JWT令牌校验:安全身份验证与授权实践
- 封装umi-request时通过 AbortController 配置取消请求
- oracle tnslistener 无法启动,Oracle监听器服务不能启动的解决方法-程序员宅基地